PHYD38. PROBLEM SET #3. SOLUTIONS OF THE
ANALYTICAL PART.
About numerics
This set requires numerical calculations.
Write and submit your own codes in any language, e.g. Python scripts
as .py text files or as PDF exported from Jupyter notebooks (not the
notebooks themselves - the format is not readable in Quercus & we
will not download and run your notebooks or codes!).
Separate picture files are ok.
In a top comment section, sign your code, describe how you chose the value of
timestep dt to assure an accurate solution. Put comments above all
important lines of code, saying what they do & why. This way we I'll know it is
your original code. If parts of the code are not yours, give credit to the
author(s), cite the source; some points will be subtracted for that.
[15 p.] Problem 1. Precession in a funnel.
A point-like particle is sliding without friction in an axisymmetric
glass funnel inclined to the horizon at angle α
 (these have a typical α = 60°).
(these have a typical α = 60°).
Two variables describing the particle are r(t) and φ(t). The first is the
distance from the axis (not a 3-D distance from the bottom of the funnel). The
third coordinate is then z = ξ r, where ξ = tan α, because
the particle is always on the surface of the funnel.
Those of you who know Lagrangian mechanics from PHYB54,
will be able to write the Lagrangian ℒ
[' and " are first and second derivatives over time and g = 9.81 m/s/s
is the Earth's gravity constant]
ℒ (r,r',φ') =
T - U = ½(1+ξ2) r'2
+ ½r2φ'2 - g ξ r
and substituting it into Euler-Lagrange equations (click on the image,
q := r or φ)

to derive the two equations of motion (derive them if you want, but that is
not required & there will be no extra points for it):
φ' = L/r2
r" = a-1 (L2/r3 - gξ)
Here, L = const. is the specific angular momentum
[per unit mass of the moving test particle, r · velocity
component perpendicular to (r,z) plane]. L = φ'r2 is
conserved because the funnel is axisymmetric. Consequently,
there is no azimuthal force and no torque on the particle
(Torque/mass = dL/dt = 0).
Constant a = 1/cos2α = 1 + ξ2 is a
shorthand for the geometry of the funnel.
The dynamical system is conservative and frictionless.
The motion starts at t=0 with sufficiently large φ' and L,
but small (non-zero) r', so that the particle circulates
inside the funnel, doing small up-and-down oscillation around a
purely horizontal circulation. The system has a neutrally stable
circular orbit (R,φ), R=const., for every r=R.
Your first task is to show analytically what φ'(0) is needed
to yield a circular orbit for any starting value R = r(0), and what is the
value of L(R) for the circular orbit. That φ' is the azimuthal
angular frequency of the circular motion, as well as the average azimuthal
speed of a nearly-circular motion:
ωφ = φ'.
(There is also an associated period of azimuthal circulation
2π/ωφ, but let's just calculate
ωφ.)
Next, sketch the acceleration r"(r) and the effective potential Φ(r)
in which the autonomous r-motion with constant L takes place. The gradient
-dΦ/dr is the r.h.s. of r-equation.
What is the frequency ωr of small radial oscillations?
Compute ωr2 either
as -1 times the slope at which acceleration r"(r) crosses the r-axis
or as the curvature of the potential (∂r)2Φ.
[Think of a harmonic oscillator r" = -ω2r,
and its quadratic potential
Φ=½ω2r2, where
ω2≡ωr2 equals both
the second derivative of Φ and the negative slope of r"(r) at the
fixed point r*=0 - but the relation is general! Incidentally, small
oscillations around equilibrium of any
system governed by Newtonian dynamics are approximated very well by harmonic
oscillator, because all minima of potential locally look like a parabola]
The difference Δω = ωφ - ωr
of the radial and azimuthal frequencies is the angular
speed of precession of the orbit. If non-zero, the orbit looks
like an ellipse turning in space, or rosette, i.e. it self-intersects
in (r,φ) plane. If Δω < 0 then the orbit gradually
rotates in the direction opposite to the sense of orbital motion, otherwise
in the same direction.
Find analytically the funnel angle α for which
there is no precession. In such a funnel, test particle exerting small
deviations from circular motion will repeatedly pass through
the starting point and its orbit is closed and periodic.
SOLUTION
1. Establishing circular orbit conditions:
Pick any R. Equations of motion read:
0 = (L2/R3 - gξ)
L = R3/2 (gξ)1/2
from which we have the angular speed required for the circularity of orbit:
φ'(R) = L/R2 = (gξ/R)1/2
2. Frequency of small radial oscillations:
Φ = a-1 [½L2/r2 + ξg r]
has a minimum at r=R, force is zero (Φ'=0), and
where the curvature is entirely due to the centrifugal barrier:
ωr2 = Φ"(R) =
(3/a) L2/r4 = (3/a) φ'(R)2 =
(3/a) ωφ2.
3. Given that a = 1/cos2α = 1 + ξ2,
the radial to azimuthal frequency ratio is
ωr/ωφ =
(3/a)1/2 = [3/(1+ξ2)]1/2
= 31/2 cos α.
4. The difference between the radial and azimuthal frequencies is the
angular speed of precession of the orbit.
There is no precession when ωφ = ωr,
i.e. when cos α = 3-1/2,
or when α = arccos 3-1/2 = 54.7356°.
Or alternatively $\alpha = \arctan \sqrt{2} = 54.7356^{\circ}$.
Interestingly, this is known as
magic angle,
and has significance in NMR (nuclear magnetic resonance) spectroscopy and
imaging.
Many commercially sold funnels have α = 60° and
would produce ωφ > ωr, shorter azimuthal
than radial period of motion, and thus precession with maximum distance points
marching in the direction of motion (prograde precession).
By experimentation, you can observe that this is also true of a rolling
motion of a small ball inside such a funnel.
[15 p.] Problem 2. Numerical calculation of motion in a funnel
Perform numerical integration covering several orbital periods,
to confirm your prediction of α for which there is no precession
in problem 1. Start with any r you like and an appropriate φ'(0),
which gives a path that is not circular but somewhat elongated.
Compare that solution with the solution in case of either
α = 60° or α = 45° (pick one value you like).
Do you find agreement of the numerical precession speed with its
analytical calculation in that case?
Write and submit your own code or Python script (see comments on numerics
above). For clarity, show the trajectory seen from the top, i.e., the orbits
should be shown in Cartesian (x,y) coordinates, not in polar coordinates, or as
separate functions r(t) and φ(t).
[30 p.] Problem 3. Trajectory starting near L2 Lagrange point
in Hill's equations
In tutorial and in Etudes, we have studied analytically the Hill's
equations of motion of a test particle in the small vicinity of a
planet, whose mass is very small compared with the star (which certainly
is very true for the Earth, whose mass is μ=3e-6 times the mass of
the sun.) See the section titled 'Stability of Lagrange points in R3B problem'
in the
Etudes and Variations.
To remind you: negative x axis points to toward the star, and we study the
planar motion of test particle in the Cartesian coordinates with rescaled
length. Coordinates (x,y) are in units of Hill sphere
radius (Roche lobe radius) $r_L= (\mu/3)^{1/3} a$, where $a$ is star-planet
distance and $\mu =$ planet mass / (star+planet mass) $\ll 1$.
The beauty of Hill's equations is that they apply to any small planet,
so the particular value of $\mu$ and $r_L$ is
unimportant, and results in the same trajectory in rescaled coordinates.
Here are the Hill's equations:
$$ \ddot{x} = -3 \frac{x}{r^3} +3x + 2\dot{y} $$
$$ \ddot{y} = -3 \frac{y}{r^3} - 2\dot{x} $$
where $r^2=x^2+y^2$. Evidently, they are quite nonlinear because of $r^{-3}$.
Time drivatives are over a nondimensional time $t$ (unit of this time
corresponds to time it takes the planet to turn 1 radian around the star).
The meaning of the right-hand side terms has been described in the quasiblog.
We already know that the positions of two fixed points are $(x^*,y^*) =
(\mp 1,0)$. We call them Lagrange points L1 and L2. One being a mirror
reflection of the other, they have the same stability properties, and the
same eigenvalues $\lambda$ and eigenvector directions.
A [5p]. Prove the constancy of Jacobi energy:
$$E_J = \frac{1}{2}(\dot{x}^2 + \dot{y}^2) -\frac{3}{\sqrt{x^2+y^2}}
-\frac{3}{2}x^2 $$
by explicitly evaluating the full time derivative $dE_J/dt$, and
showing that it vanishes. Don't forget about the inner derivatives!
B [25p]. Numerical trajectory
Notice that we have four variables: $x,\dot{x},y,\dot{y}$. So we have a
4-D dynamical system. Program one of the many methods for solving the
dynamical equations. Preferably use the leapfrog scheme (looks quite like
Euler scheme when the starting velocity is zero). If you use someone else's
software (commercial/internet) to integrate the equations, state that and
25% of points for this section will be subtracted.
At the beginnig, set the constant timestep to $\Delta t \sim 0.05$. As you
integrate the system in time, print out from time to time (printing in every
timestep creates too much output on the screen, but if you don't mind..) the
value of Jacobi energy. Make sure the $E_J$ you start with does not differ
from the final value by more than $10^{-4}$, otherwise consider the trajectory
inaccurate and repeat the whole calculation with a smaller timestep. State
the satisfactory value of timestep and the relative EJ error
you have obtained (this could be in the comments section of your code).
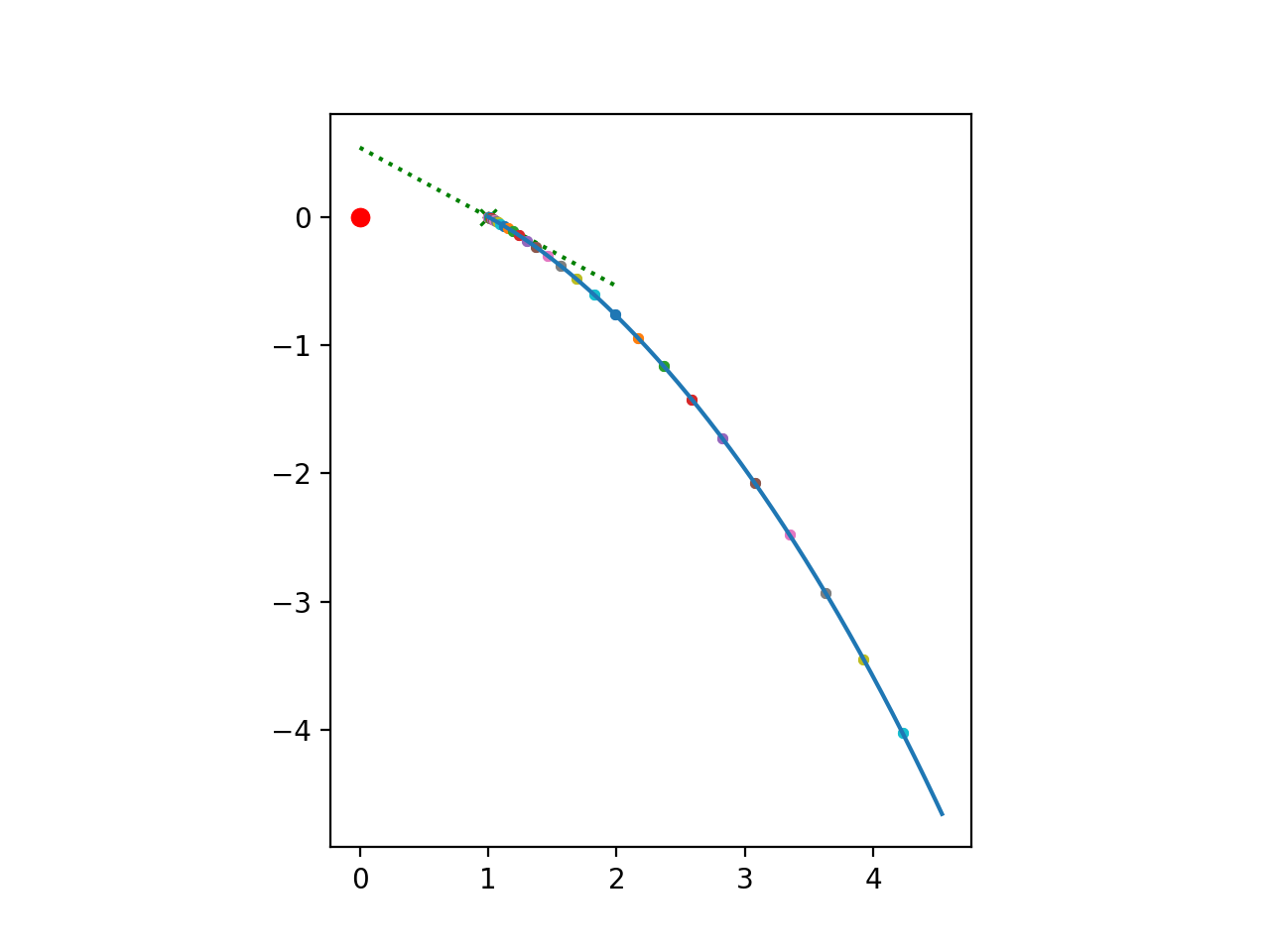
Compute the departure from point (1,0) toward the planet, the center of
attraction at (0,0). If you place a fixed point at rest, it won't start
moving. Therefore, begin from (x,y) = (0.9999,0.00005), and
$(\dot{x},\dot{y}) = (0,0)$.
Continue integration of Hills equations until such time that the orbit goes
around the planet about 7 times. If you extend the time, trajectory overlaps
so much that it is hard to follow its course.
Plot the trajectory and overplot positions of L2 and the planet, as well as
marker points of a different color and size distinguishing them from the
trajectory curve, every 0.1 time unit. Such visualization helps to see the
speed in addition to direction of motion at every point of particle trajectory.
Overplot the eigenvector direction (-1,0.5399) found analytically in Etudes,
using a dotted line. Submit your well-commented program.
Suggestions on graphics:
Try to plot the trajectory with 1:1 aspect ratio if you can, that is with
equally sized units on x and y axes. In Python, one can precede plotting with
command such as
fig,ax = plt.subplots()
and then plot both the line of trajectory: plt.plot(trajx.trajy), and/or
overlay individual points (x,y) points via: plt.plt([x,x],[y,y],marker="."),
and then do ax.set(aspect=1). Planet's position can be plotted like this: plt.plot([0,0],[0,0],"ro").
SOLUTIONS
A. Here is the proof that Jacobi energy is constant.
$$\frac{dE_J}{dt} = \dot{x} \ddot{x} +\dot{y} \ddot{y}
+\frac{3(x\dot{x}+y\dot{y})}{r^3} -3x \dot{x}$$
(because $x^2+y^2 = r^2$).
Substituting for $\ddot{x}$ and $\ddot{y}$ from the Hill's equations,
we can see that in the sum of the first two terms on the right-hand side,
Coriolis terms cancel ($2\dot{x}\dot{y} - 2\dot{y}\dot{x}=0$). The physical
reason is that Coriolis acceleration being perpendicular to the velocity, it
does not change the energy. The rest of those two first terms is cancelling
exacly the remaining 3rd and 4th terms. The Jacobi energy does not change in
time. q.e.d.
See also this sheet (Point B)
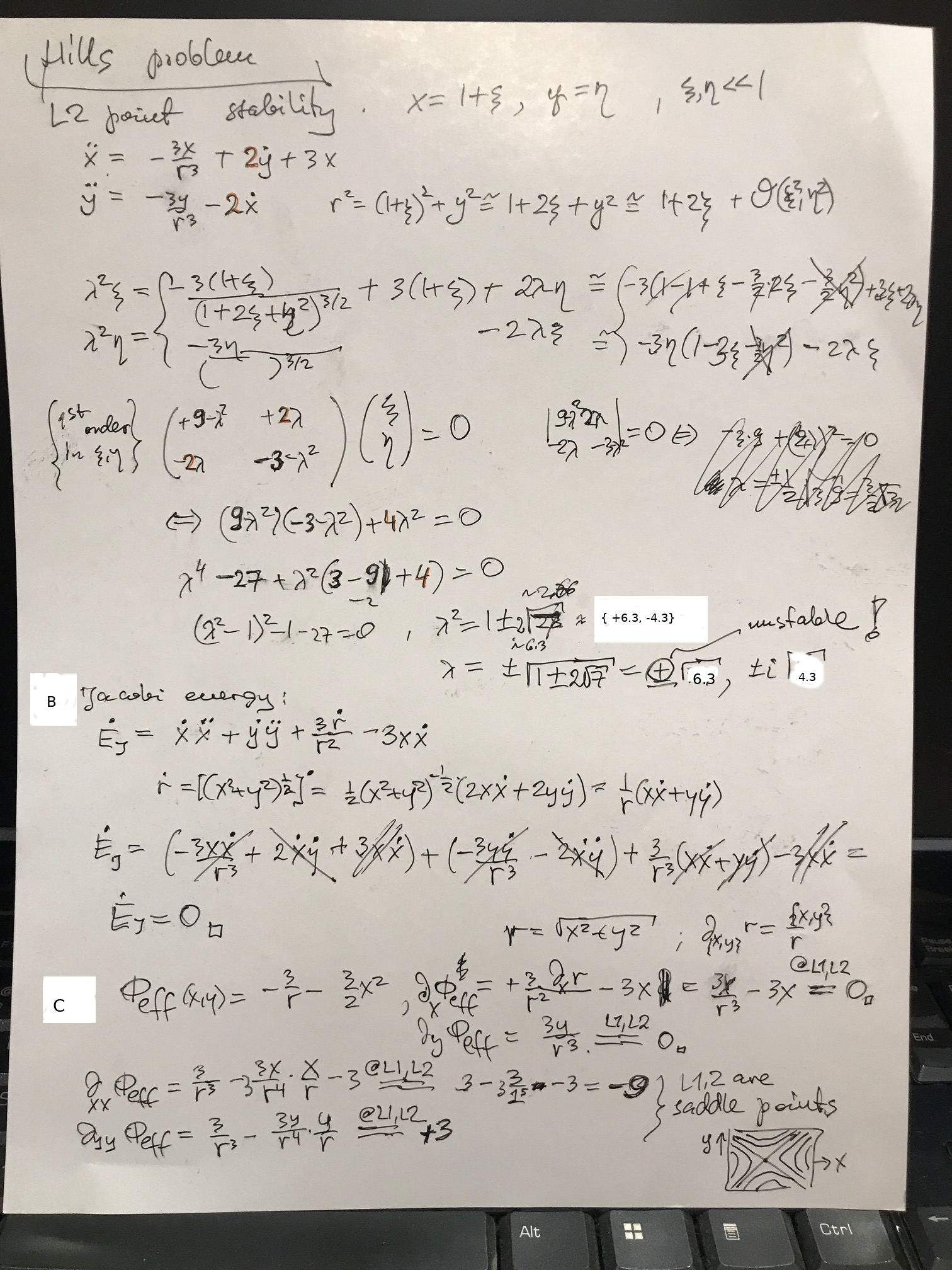
C. The effective potential is that part of the $E_J$ formula, which
does not depend on velocity components (since that's kinetic energy part).
$$\Phi_{eff} = -\frac{3}{r} -\frac{3}{2}x^2$$
At L-point, its first derivatives (forces or accelerations)
vanish and the second derivatives (curvatures) along $x$ and $y$ axes
have opposite signs. Curvature along x is negative (-9) and along y
axis is positive (+3). See the calculation sheet above. That's a hallmark of
a saddle point, and the equipotential lines would show this more clearly.
Although equipotential lines of $\Phi_{eff}$ are not flow lines (along which
$E_J = \Phi_{eff} + v^2/2$, not $\Phi_{eff}$ iteself, is constant), they do
show boundaries of possible motion for a given value of the Jacobi constant.
Equipotential lines are zero-velocity curves.
D.
The trajectory plot shows the planet as a red dot, markers on trajectory are
every Δt=0.1, i.e. every 1000 timesteps & eigendirection passing through
L2 (dotted green line):
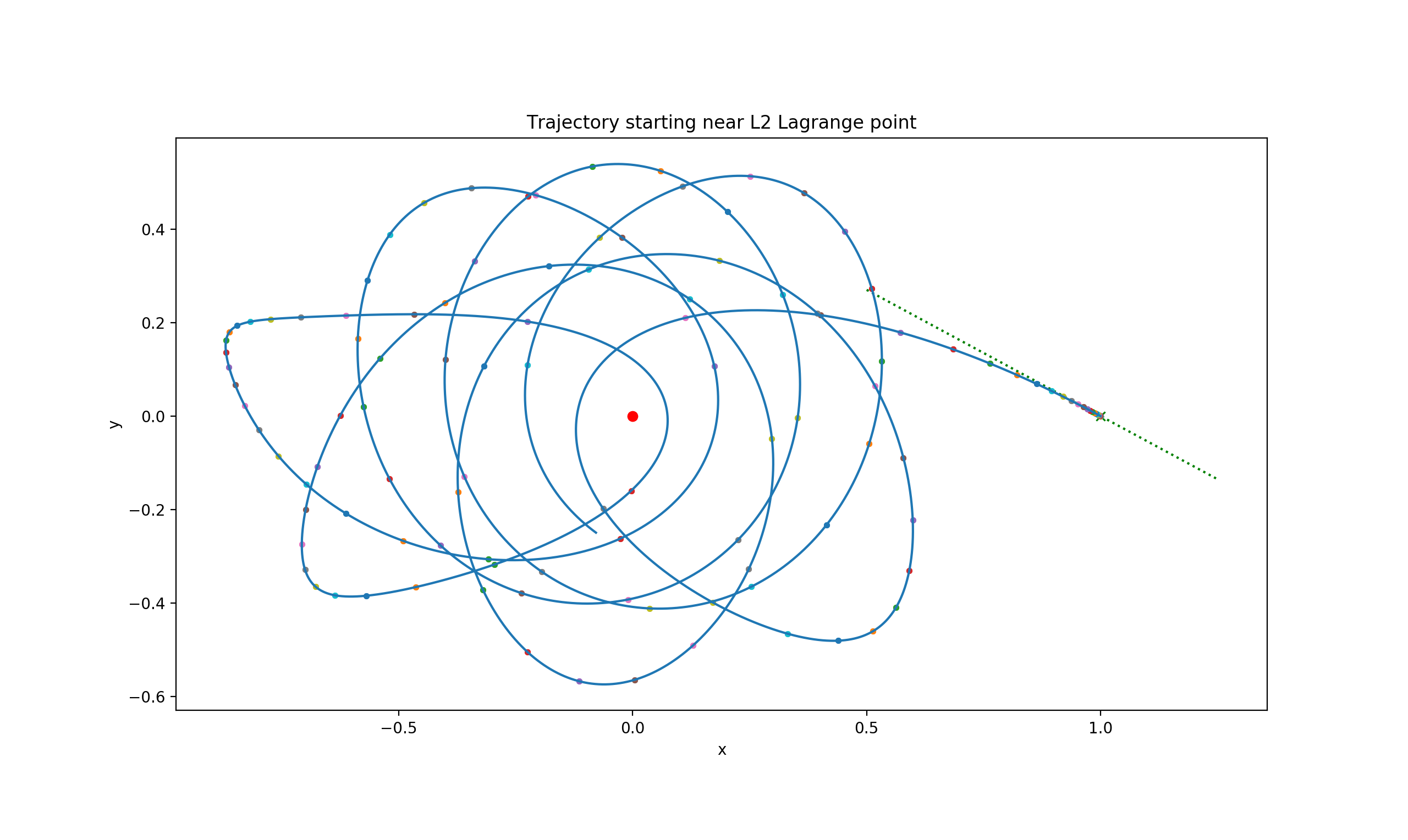
Notice that that a meaningful trajectory passing exactly through L2 could be
constructed, but the time of passage would be infinite (critical slow-down
at the unstable node).
[20 p.] Problem 4 - Rössler attractor
This simple 3-d systems with real coefficients $a,b,c=cont.$:
$$\dot{x} = -y -z $$
$$\dot{y} = x + a y$$
$$\dot{z} = b + z(x-c)$$
unlike the more non-linear Lorenz attractor
has only one nonlinear term ($zx$ in 3rd equation).
A. Is this system a chaotic attractor?
Starting from starting point $x=y=z=1$,
numerically evolve the system for $a=0.3$, $b=0.2$ and $c =6$.
Use numerical integrator of your choice (write your own script or program and
enclose it as a file, cf. remarks on numerics at the beginning of assignment).
Recommended method is Euler method with short time step $\Delta t = 10^{-3}$.
Continue up to time $T > 50$, large enough to clarify the bahavior and
illustrate the chaotic or non-chaotic behaviour clearly.
Plot the trajectory in the projection on $(x,z)$ plane (i.e. ignore $y$ while
plotting). Then ignore $z$ and produce another plot of $(x,y)$ projection.
B. Bifurcation.
Vary the parameter $c$ in the range $0 \lt c \lt 20$. Observe bifurcations
(jumps in behaviour), describe your results and illustrate with just a few
plots, included in solutions file or clearly described, if you submit separate
figures.
C. Lyapunov exponent.
Adopt $a=0.2$, $b=0.2$ and $c =5.7$ and create a variant of your code to
follow two different trajectories ($x_1,y_1,z_1$) and ($x_2,y_2,z_2$) at
the same time. Start the 2nd trajectory with $x = y = 1$, and $z = 1-
10^{-6}$, and plot the 3-d distance between the trajectories as a function
of time. Use log-linear scale, that is plot decimal logarithm of $D =
||(x_1,y_1,z_1)- (x_2,y_2,z_2)||$ vs. time. From the plot, estimate the
Lyapunov exponent $\lambda$. Desregarding little wiggles and possible
occasional jumps, we expect $D(t) \sim \exp(\lambda t)$.
Solutions
In a log-lin plot submitted by Chad F., the curve has small wiggles and
occasional jumps, so one has to pick a time interval where the growth of
distance is exponential (linear in log-lin plot).

(The initial distance was 1e-9 instead of 1e-6 suggested in the problem.
It's just as well.) The value is $\lambda \approx 0.094$, agreeing with
a recent semi-analytical work in a
paper by Zhen et al. (2024) titled "An analytic estimation for the largest
Lyapunov exponent of the Rössler chaotic system based on the synchronization
method", for slightly different parameter. Fig.1. shows values close to 0.09.