

In the tutorial, we fully solved the physical problem of rotating stand
with a horizontally moving bead of mass $m$ under the three forces: centrifugal ($+m \omega^2 x$), large friction ($-\beta m \dot{x}$ much
larger in absolute sense than $m \ddot{x}$), elastic force of a
linear spring of strength $k$ & neutral (unstressed) length $h/2$,
attached on the axis at a level $h$ below the horizontal wire.
The frame rotates around the vertical axis with angular speed
(or circular frequency) $\omega$.
Enlarge and see the pictures:



We introduced a nondimesional coordinate $y = x/h$. There is one parameter controlling the behavior of the bead, a nondimensional rotation rate $\gamma = \omega^2 (m/k)$. Time has been rescaled somehow (it's not important for bifurcation diagram how) and the new time variable is called $\tau$. The method of solution is graphically shown as plotting first $\gamma(y^*)$, and flipping the graph to obtain bifurcation diagram $y_*(\gamma)$.
We got a somewhat strange-looking, but sensible, supercritical pitchfork bifurcation. We did not have the time to add the analysis of the small imperfection of the system, which gives the bead a very small and constant acceleration along $x$-axis. Think of it yourself! I'll ask you about your conclusions. Rotating 1-D systems have been the subject of midterm problems in this course.


This system actually has an explicit $\theta(t)$ solution that we
developed, using Gradshteyn and Ryzhik "Table of integrals, products and
series", 2007 edition,
1996 ed.
We computed the period of circulation $T$, it has a very typical
dependence on parameters.

The first matrix considered was representing system (if I remember correctly)
$\dot{x} = x + 2y$
$\dot{y} = 4x -2y$
..but no snapshot of the solution seems to have survived :-(.
Fixed point (which for such equations is at the origin of
coordinates, but in general could be somewhere else if constant
terms were added to the r.h.sides) was the saddle point.
One eigendirection was along the vector $(0.9,1)$ or so, corresponding
to eigenvalue $\lambda_1\approx +2.3$ (the direction is a linear
trajectory of exponential departure from the fixed
point). Another eigendirection $(-0.5,1)$ or
so, corresponding to eigenvalue $\lambda_2\approx -3.5$ described
a straight-line trajectory of exponential approach to the same
saddle point. The point is unstable in Liapunov sense (see textbook)
so to us it is unstable.
Remember that eigendirection can be obtained by either by
assuming $y=1$ or $x=1$, they are lines, so arbitrarily
rescaling ${\bf v}_{1,2}$ vectors is allowed, only the slope
$y/x$ matters, and that won't be affected of whether we choose $x$
or $y$ to be 1.
The second matrix considered was representing system
$\dot{x} = y$
$\dot{y} = -2x$


This system has $\tau = \lambda_1 + \lambda_2 = 0 $, and thus two oppositely
signed, imaginary eigenvalues $\lambda$. The fixed point is a center, and
purely real solutions are following from any real-valued initial $(x,y)$
coordinates.
Do not be worried in such cases that eigenvectors have imaginary (in
general, complex) values! Carry on the math. It's ok, they do not represent
any straint lines in the phase plane. Trajectories are ellipses or spirals,
in general.




Then we followed the Theory of Flight [Dynamics] on our Etudes quasiblog, topic 3.
The other way the proof is more difficult. I forgot how the companion book proves that $\partial f/\partial y = \partial g/\partial x$ is a sufficient condition for $(f,g)$ being a gradient of some function, but I suspect that the proof below is more sound mathematically and actually tells you how the potential $V(x,y)$ can be computed.
We use the Stokes theorem that states the equivalence of area integral of curl $\vec{f}$ with the line integral of the vector field $\vec{f}$ (in our case that would be $\bf \dot{x}$) over a closed curve forming the border of a 2-d area $A$. $$\int \int (\nabla \times \vec{f}) \cdot d^2\vec{A} = \oint \vec{f} \cdot \vec{dl}$$ Here, $\vec{dl}=(dx,dy)$ is the line element of the closed curve, while $d^2\vec{A}$ is the oriented area element (normal vector of length $dx\,dy$).
In a dynamical system where ${\bf \dot{x} = \vec{f} } = \{f,g\}$, and $\partial f/\partial y = \partial g/\partial x$, the rotation of the vector field has only one component (perpendicular to the $x,y$ plane) and value $|\nabla \times \vec{f}| = \partial f/\partial y - \partial g/\partial x = 0$, therefore the area integral equals zero, and it follows that the circulation (line integral) is also zero, for any closed curve over which we integrate. The only case where that is not true is when the closed curve goes around a fixed point that is a circle, so we have to insist that the the domain that we discuss does not have them. (The more times we go around the circle fixed point in the same direction, clockwise or otherwise, the more line integral value we accumulate, and the integral is not unique.)
From that it follows (I think I didn't say that during the lecture!) that the line integral from one point in the pahse plane to another is a unique functional of those two points. Let's take as the first point, without restricting the generality of the proof, the origin $(x,y)=(0,0)$. Then the line integral from (0,0) to any point ${\bf x}=(x,y)$ does NOT depend on the path taken. Let's prove it.
Imagine two different path, and form a closed loop of them (go to the point ${\bf x}$ one way, and return to the origin on any other path). The result of the integration over the loop is zero, under our condition that curl (rot) of the flow field vanishes. Swapping the limits in the second integral, which is equivalent to the reversal of the direction of travel, you see that the difference of two integrals starting from (0,0) and ending at ${\bf x}$ via different (arbitrary) paths vanishes, q.e.d.
That line integral is our $-V({\bf x})$, a unique function of ${\bf x}$: $$ V({\bf x}) = -\int_{\bf 0}^{\bf x} \vec{f} \cdot \vec{dl} = -\int_{\bf 0}^{\bf x} (f \,dx + g\, dy).$$ Nabla operator is just partial differentiation in $x$ and $y$ direction, with which we can go under the integral sign (and use the fundamental theorem of calculus, derivative of integral is the integrated function, $f$ and $g$ in $x$ and $y$ direction): $$-{\nabla} V = -(\partial_x,\partial_y) V({\bf x}) = (f,g) = \vec{f},$$ which proves that under our rotationless (curl-free) flow field assumption, in domains devoid of sources of rotation like center fixed points, our system is indeed a gradient system ${\bf \dot{x} } = \vec{f} = -\nabla V$, and we have even provided a prescription for finding $V$! You may notice that this is exactly the way we compute gravitational or electrostatic potentials of a given force field $\vec{f}$, although in the phase plane that vector is not a "force" but more like velocity of points in phase plane, a typical representation of a 2-d dynamical system. Points move in time in the phase plane, and their direction of motion is everywhere perpendicular to equipotential curves of $V$. In such systems, $V$ decreases and can never increase, therefore closed trajectories are excluded.
You already know that all the saddle points of potential are unstable, even if the system is uniformly rotating (as it is here - we go into the frame rotating with two massive bodies and consider the motion of a massless test particle in such a system). Three colinear Lagrange equilibrium points L1..L3 are keeping a constant, colinear, configuration with the centers of massive bodies. They stand still in a corotating system of reference. And they are saddle points of effective potential, so - dynamically unstable. In case the motion starts from the vicinity of such L point, there is a preferred direction, given by the eigenvector belonging to the positive, real eigenvalue $\lambda$, in which the test particles leave the close vicinity of L1 or L2 point (L1 and L2 are equvalent in Hill's equations, there is mirror symmetry).
You are asked to find the unique direction in which
particles (gas particles, meteoroids, or spacecraft placed at L1,2 points)
flow, while leaving the equilibrium points. A secondary issue: what is the
timescale on which the distance from the L point increases $e$ times
(think of J. Webb telescope placed near L2 point!).
By how many degrees is that direction inclined to the x-axis joining
the massive bodies?
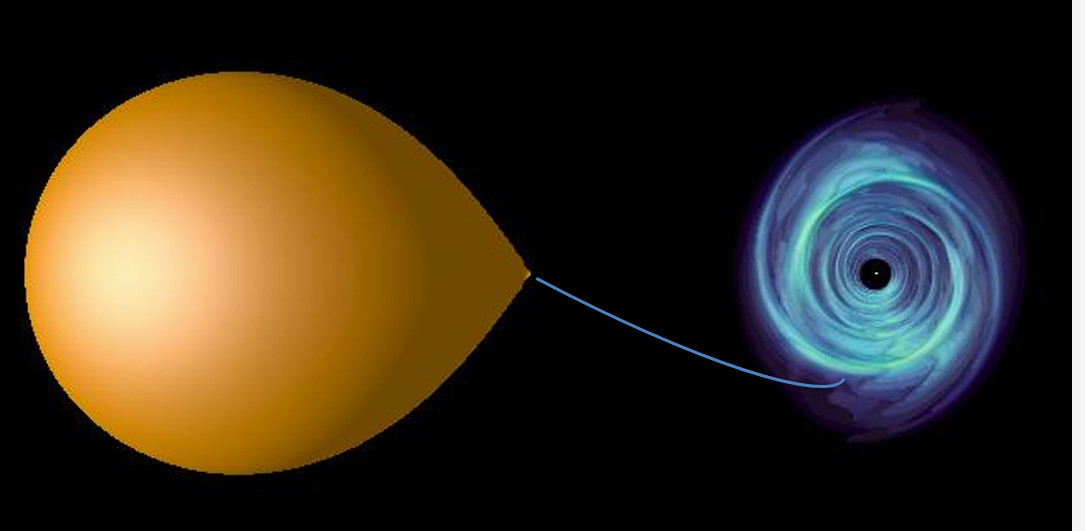
Hint: it's not zero. Astronomer have clever ways of
seeing the flow direction and what happens with it after it approaches a masive
body (star or planet), which are equivalent to computerized tomography.
One difference is that, unlike in a binary system of stars, in a CT scan the
detectors (line of sight) rotate around you, not the other way around.
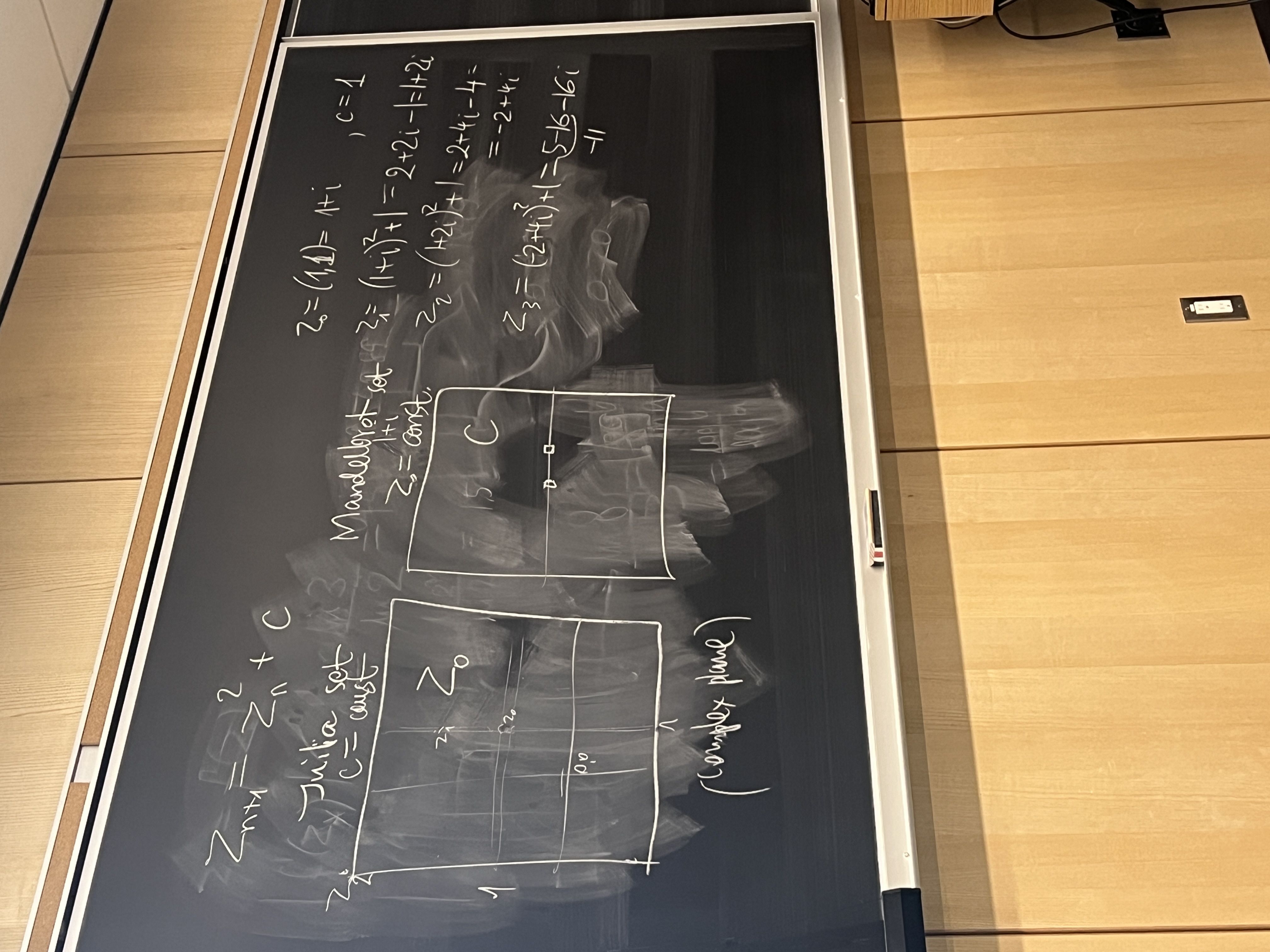
But while the Julia set fixes parameter $c$ and explores all (complex)
starting values of the iterated variable $z$, the Mandelbrot set
fixes $z_0$ (usually at zero value), and explores in the plot all possible
values of $c$.
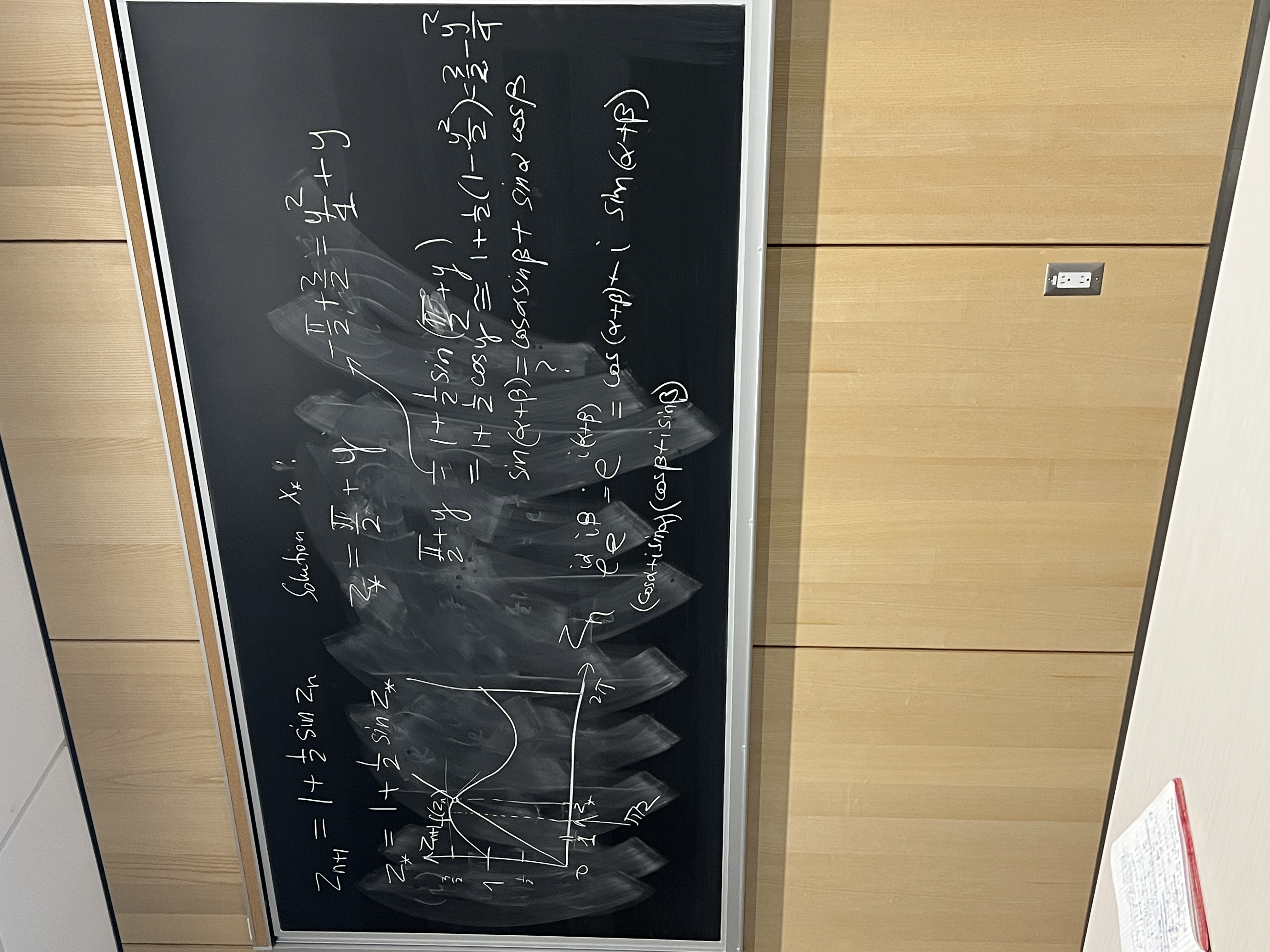
Here is the proof (again!) that $|f'_*|\lt 1$ is the criterion for stable
fixed point of any nonlinear mapping, if that first derivative is non-zero of
course (otherwise, higher derivatives need to be included and stability type
established):
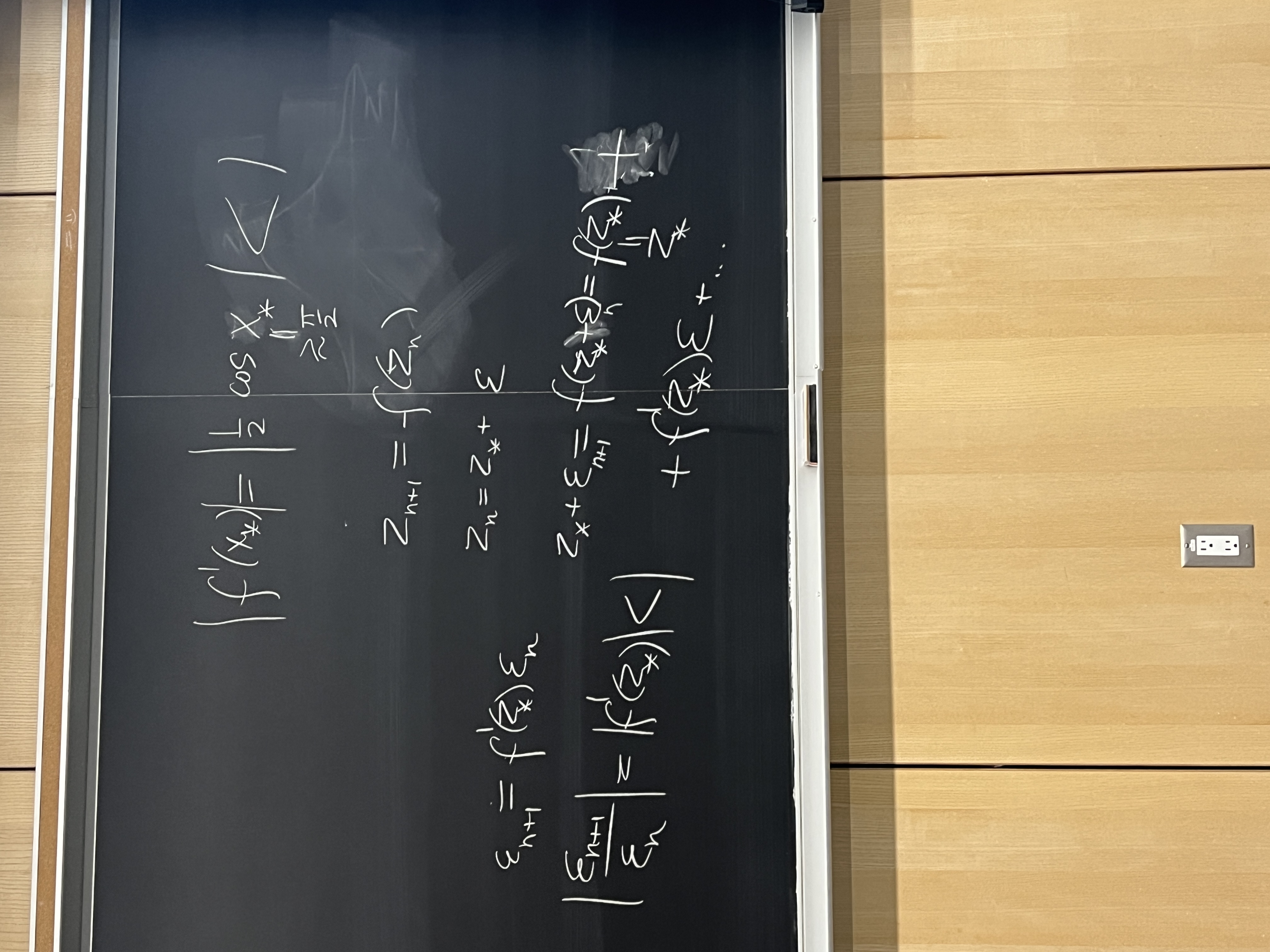
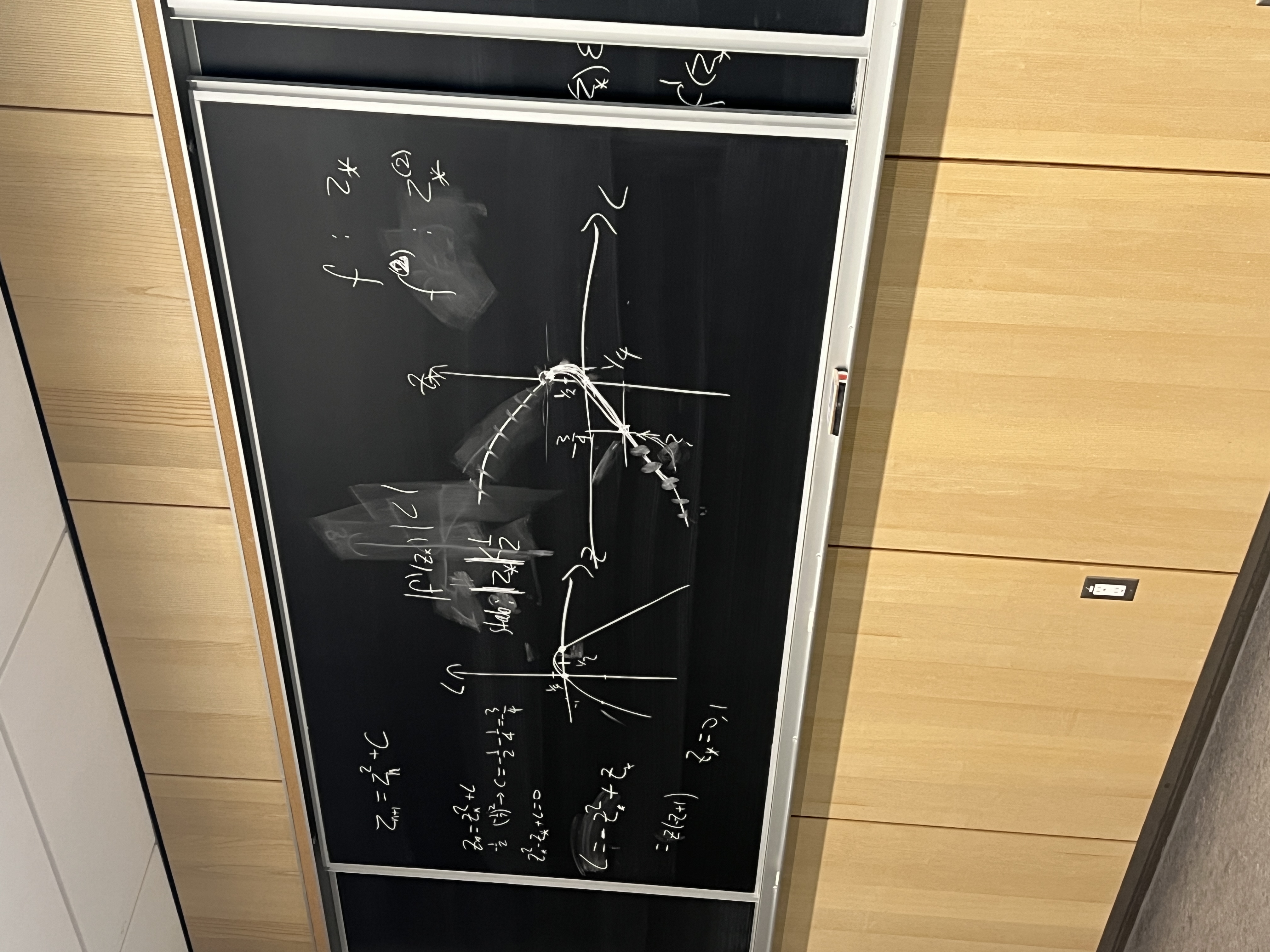
This criterion is applied to the quadratic mapping (relevant to Julia and
Mandelbrot sets)
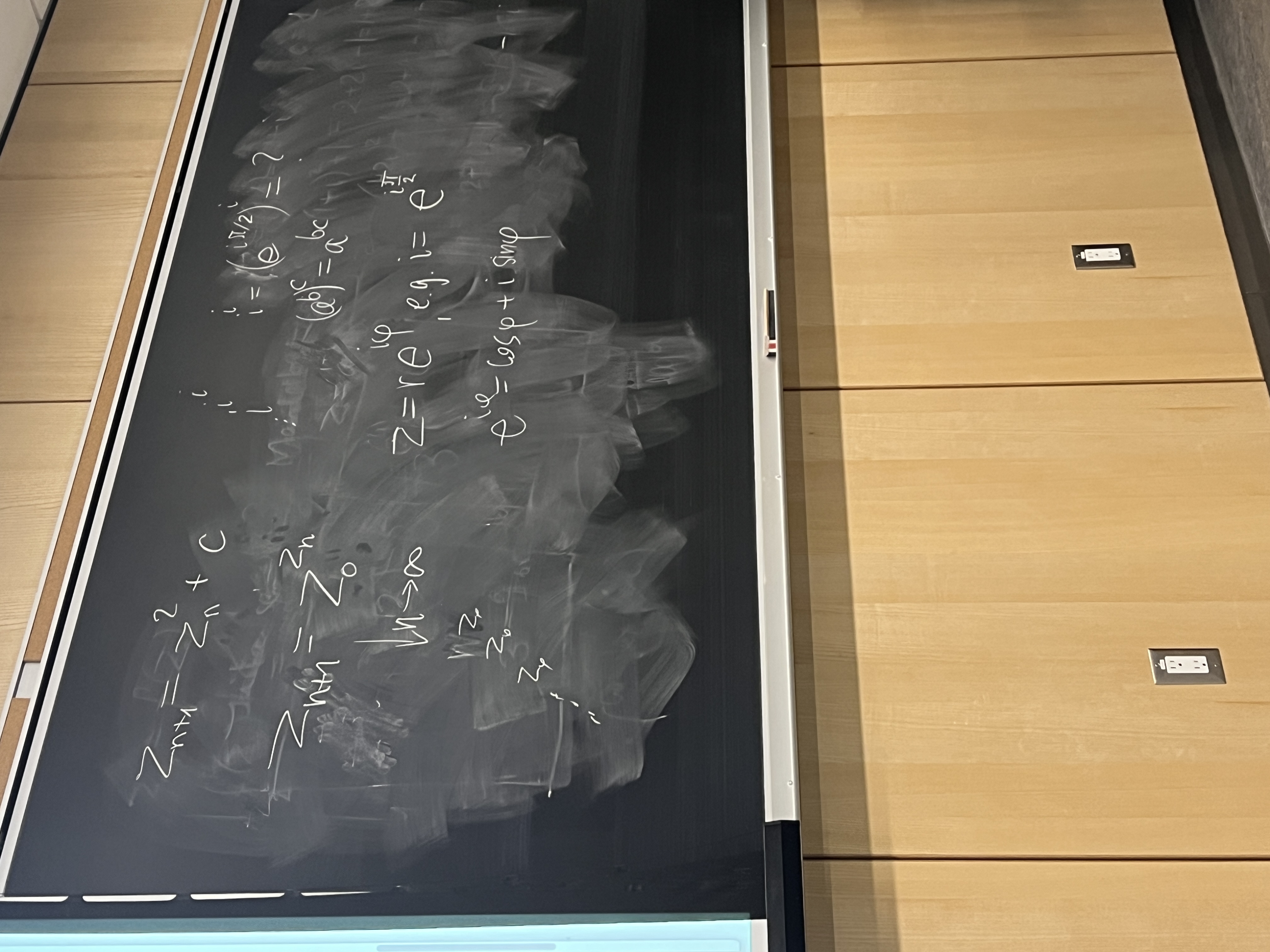
We also talked about the $..i^{i^{i^i}}$ infinite exponentiation series. We even wrote a Python script to display its progress in complex plane. Take a look at the Etudes and Variations blog, the last chapter titled "How to compute a new math constant fast".
See the description of 'my' self-exponentiating fractal . We reviewed this, but fankly someone should do an animation of a zoom into it. It was technically impossible to do thousands of frames for such a video in the 1990s. The self-exponentiation fractal is arguably more beautiful than the Mandelbrot one.